These brief instructions will help you get started with the simulator. The other topics in this help provide additional information and detail about working with other aspects of this platform.
Getting Started
Welcome to the SWARM Developer System!1. Install and Prepare Your Environment
Please follow the guide for installation in Installation Guide2. Install Your License Key
In the welcome email you received, please put the file labelled `LicenseKey.json` in the `settings` folder in the root of the `SWARM-RDS-Client` repository.
3. Open the SWARM RDS Application
Depending on your operating system, you may need to either double click the downloaded folder or application icon, or run the following command in a terminal:./app
4. Set Your SWARM RDS Repo path and IP Address
The SWARM RDS application uses the SWARM RDS repository to run simulations, save your settings file, provide a place for you to develop algorithms and more. You should have cloned the repository during installation, but can do so now if you have not. To find the folder, you can use the Browse icon to find the SWARM-RDS-Client folder and click "Choose". You can also type in the path directly into the text box.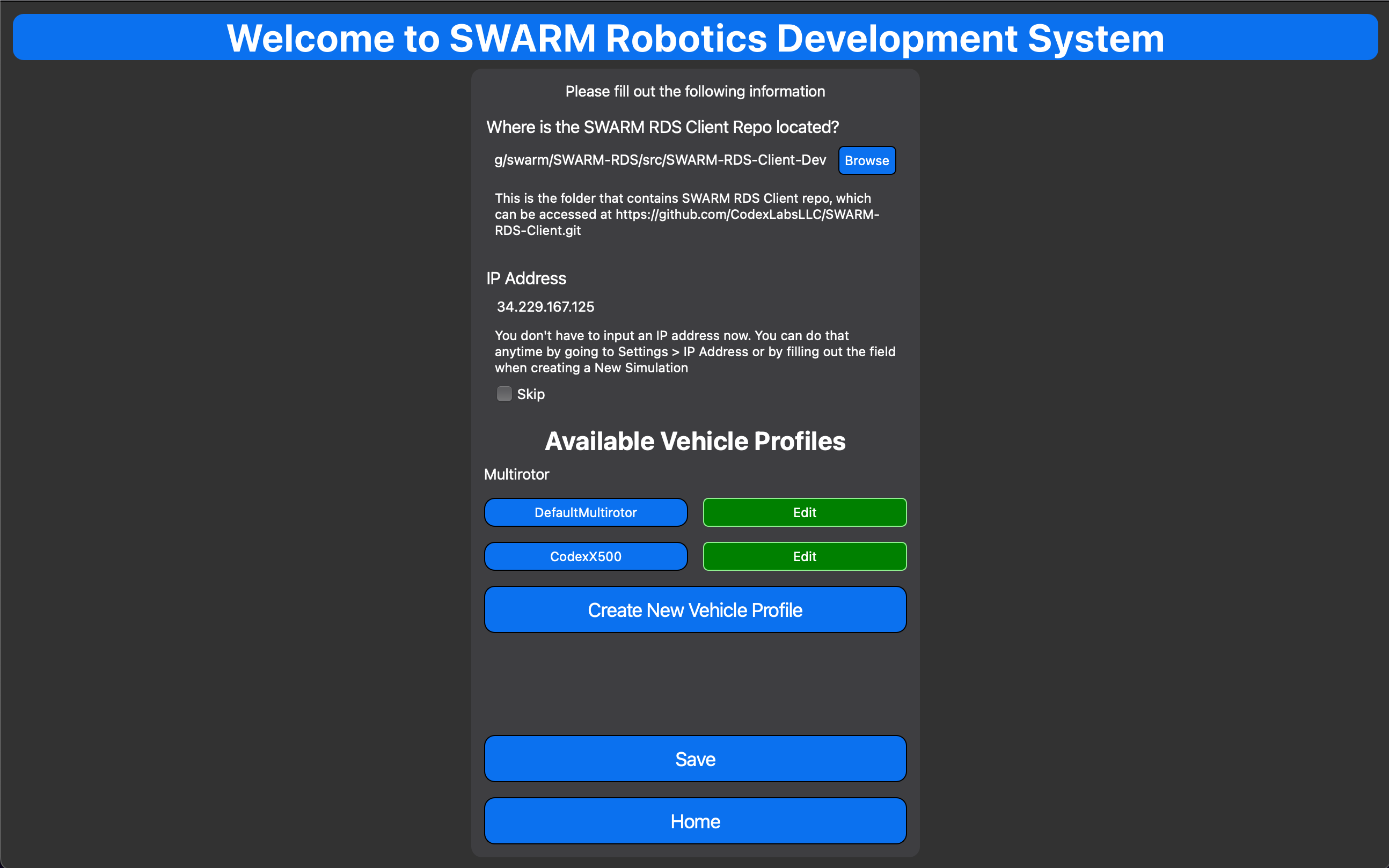 You will also need to set the IP Address of the SWARM RDS Server. Since you are
using the local version, you do not need to enter this as "localhost" or "127.0.0.1"
is utilized by default. If you are using the Cloud version, please go to the
Cloud version of this tutorial for more information.
You will also need to set the IP Address of the SWARM RDS Server. Since you are
using the local version, you do not need to enter this as "localhost" or "127.0.0.1"
is utilized by default. If you are using the Cloud version, please go to the
Cloud version of this tutorial for more information.
5. Set Up Your Simulation
We will start with the Hello World Simulation, by choosing "New Simulation" from the main screen.
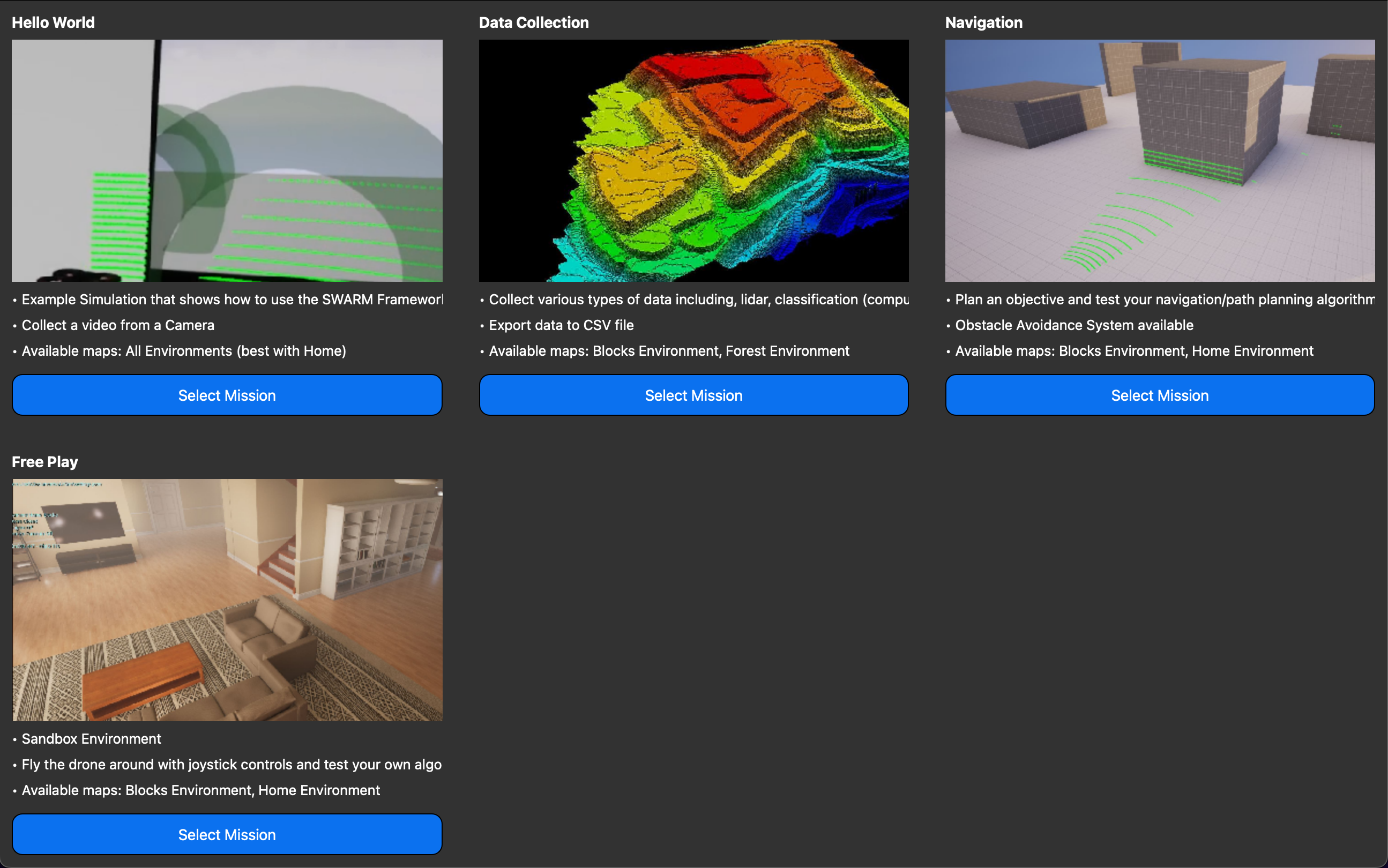
6. Hello World Introduction
Click "Hello World Introduction" on the next Screen as the Mission. This will load in a set of parameters into the system.Note: What is a Mission?
A Mission is a set of parameters and objectives that each Simulation is measured against. In future updates, you will be able to select from a wide variety of Missions and build your own.
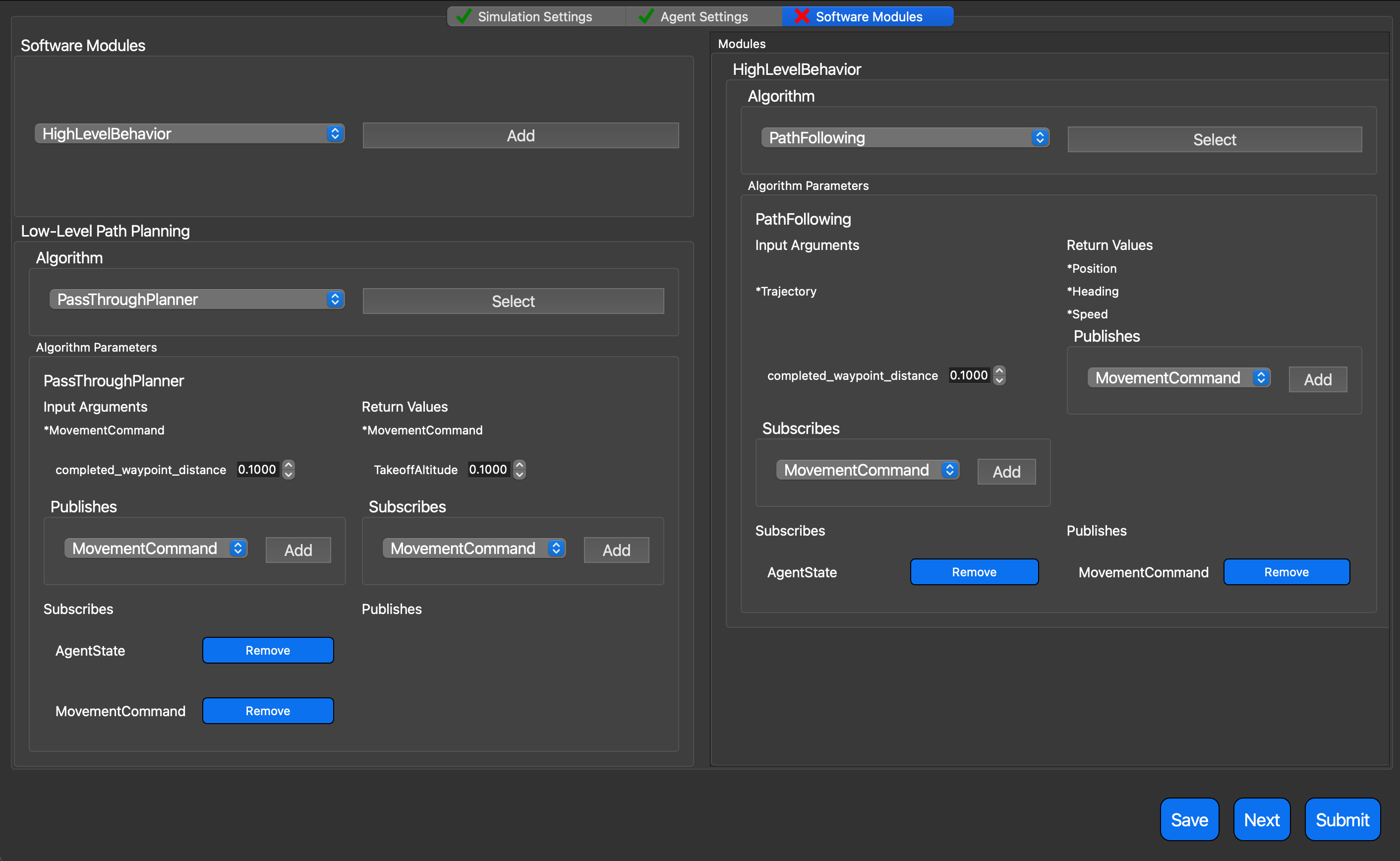
7. Modify and Save your Simulation, Agent and Software Parameters
You can modify each of the three tabs that you see on the screen. You must click 'Save' at the bottom for each tab before clicking 'Submit'. If you click 'Next', the system will automatically save the current tab and move to the next one.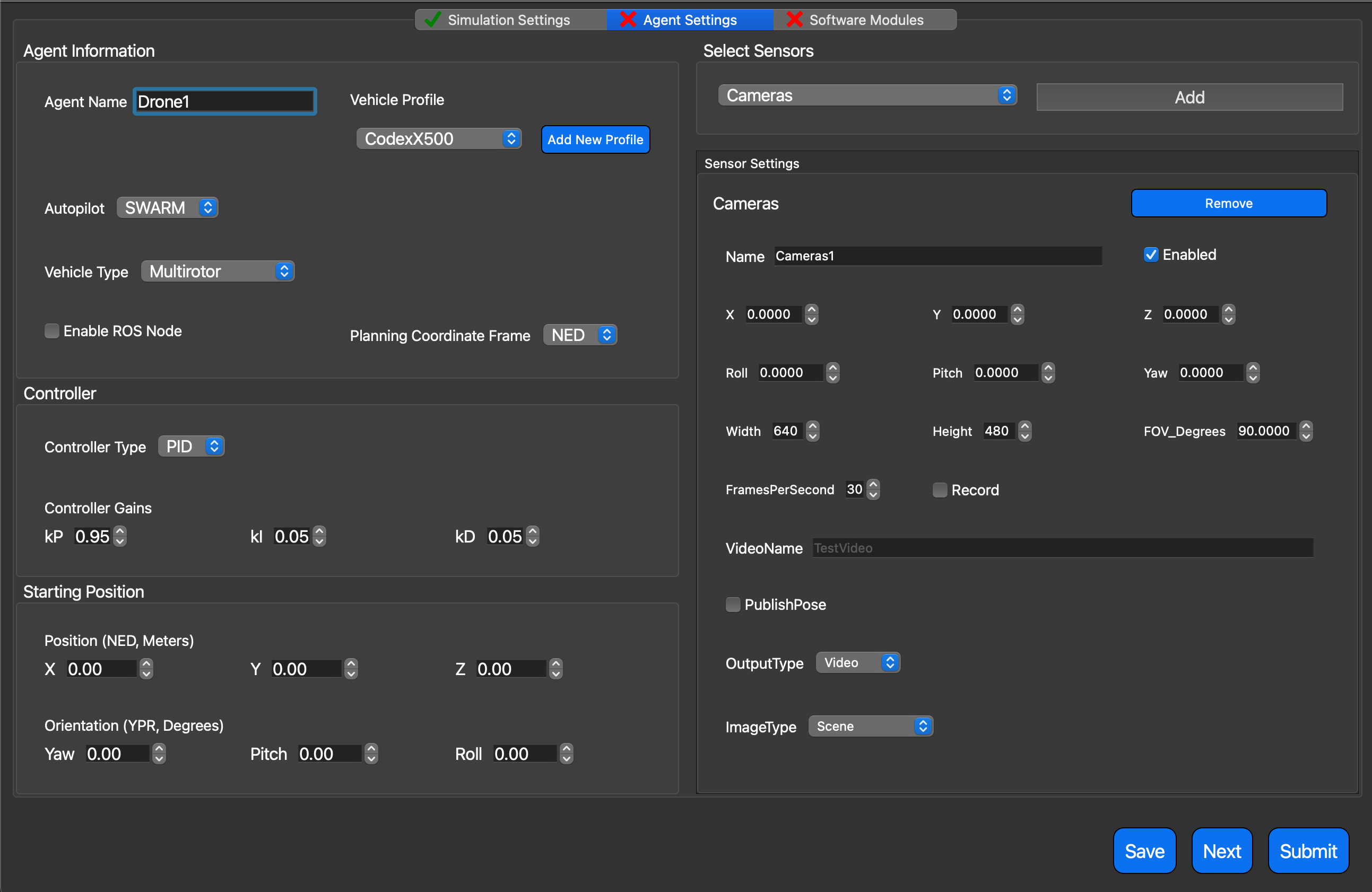
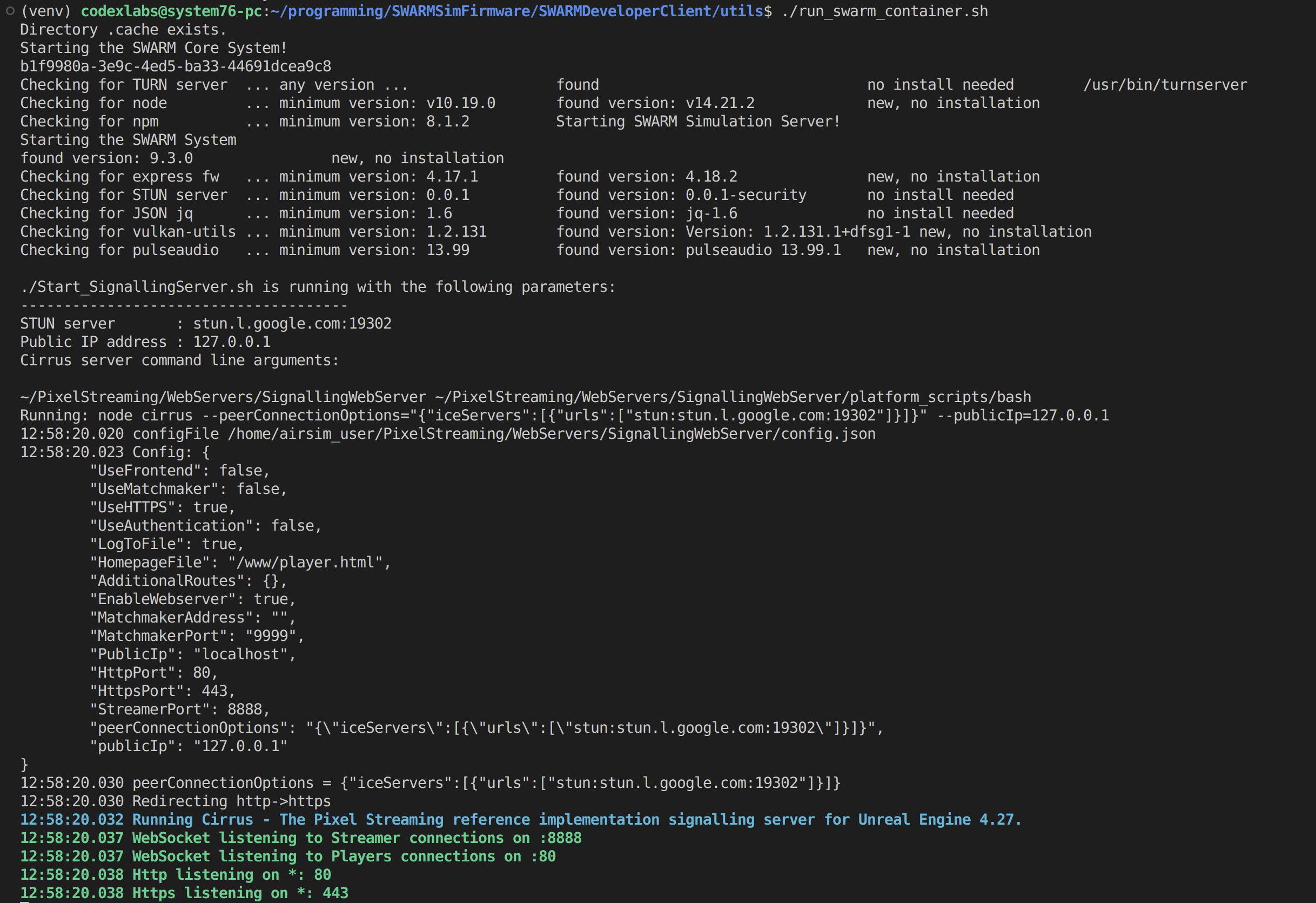
8. Start the SWARM RDS Server
Next, you will need to ensure that you have correctly installed the SWARM RDS Server on your computer. Please refer to the installation instructions if you have not already done so. Using the shell file that has been provided in the `scripts` folder, please run said file in the same directory that contains the `.cache` directory. Ensure that you add the name of the container you are using to the end of the command. For example, if you have the container named `swarm-blocks:1.7.2-ros`, you would run:./scripts/run_swarm_simulation.sh swarm-blocks:1.7.2-rosNote: Proxy Servers
If you have a proxy server, please ensure you have followed the directions in the setup process to add your proxy server settings to the container.
9. Submit Your Simulation
Once you have clicked save on each tab, you can click submit. You will see a notification that tells you the path to the settings file that has been generated for this simulation. This allows you to quickly and easily re-run simulations with the same set of parameters that you used previously.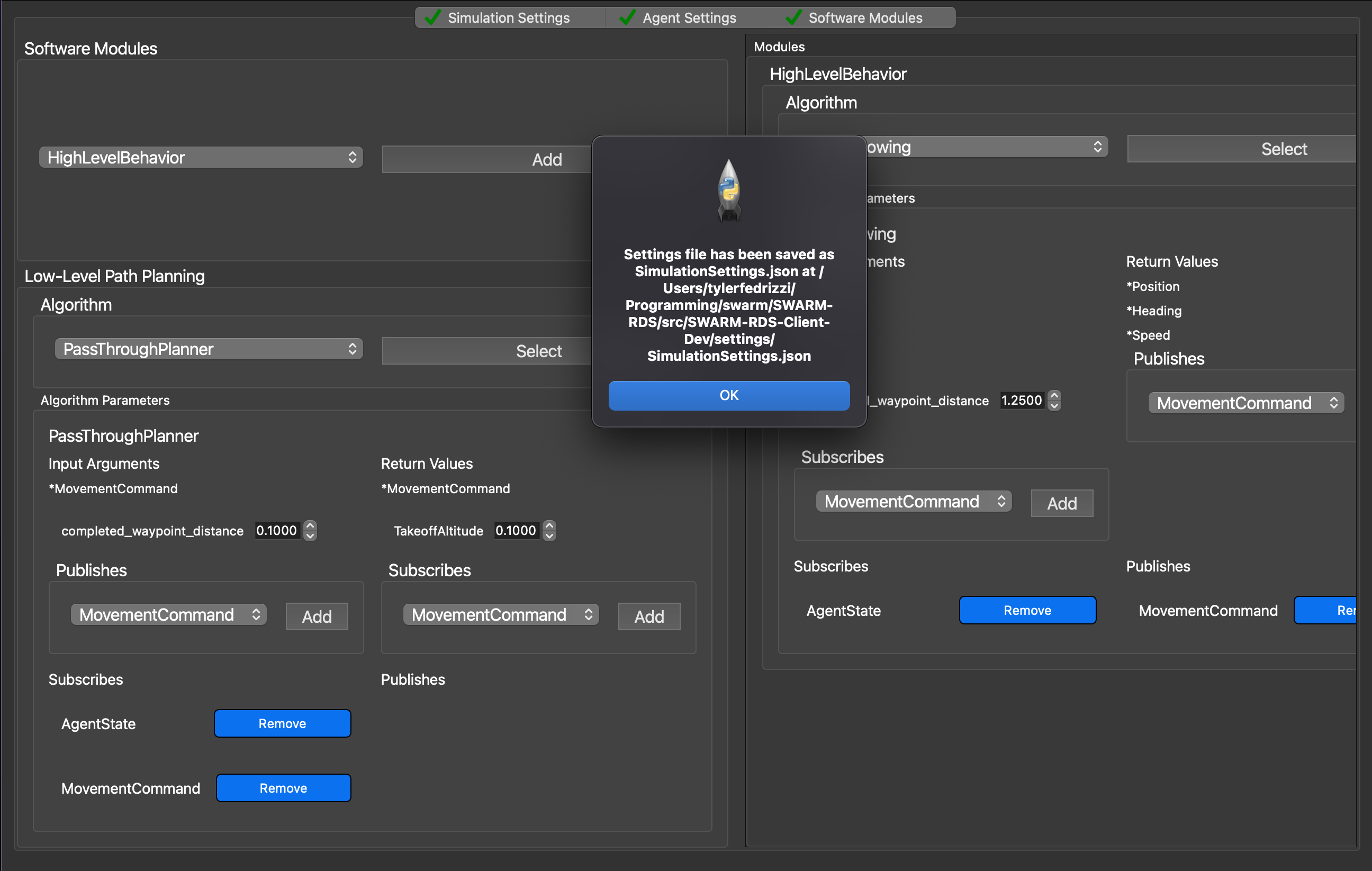
10. View Your Simulation
View the Streaming output by going to any web browser and typing `127.0.0.1` or clicking 'Launch Streamer' on the Simulation Command Center window, then click "Start" to view the stream. This is a fully interactive client that will allow you to control the camera. (Hit `F1` to view options!)