This page provides a brief description about the testing environments provided in the SWARM Development system.
Development Environments
As part of the SWARM Developer Platform, we provide a number of testing environments that help users test and develop autonomous flight control algorithms.
Supported Levels
Below are our current environments, with detailed information about which features are supported for each environment:
SWARM Test levels
Description
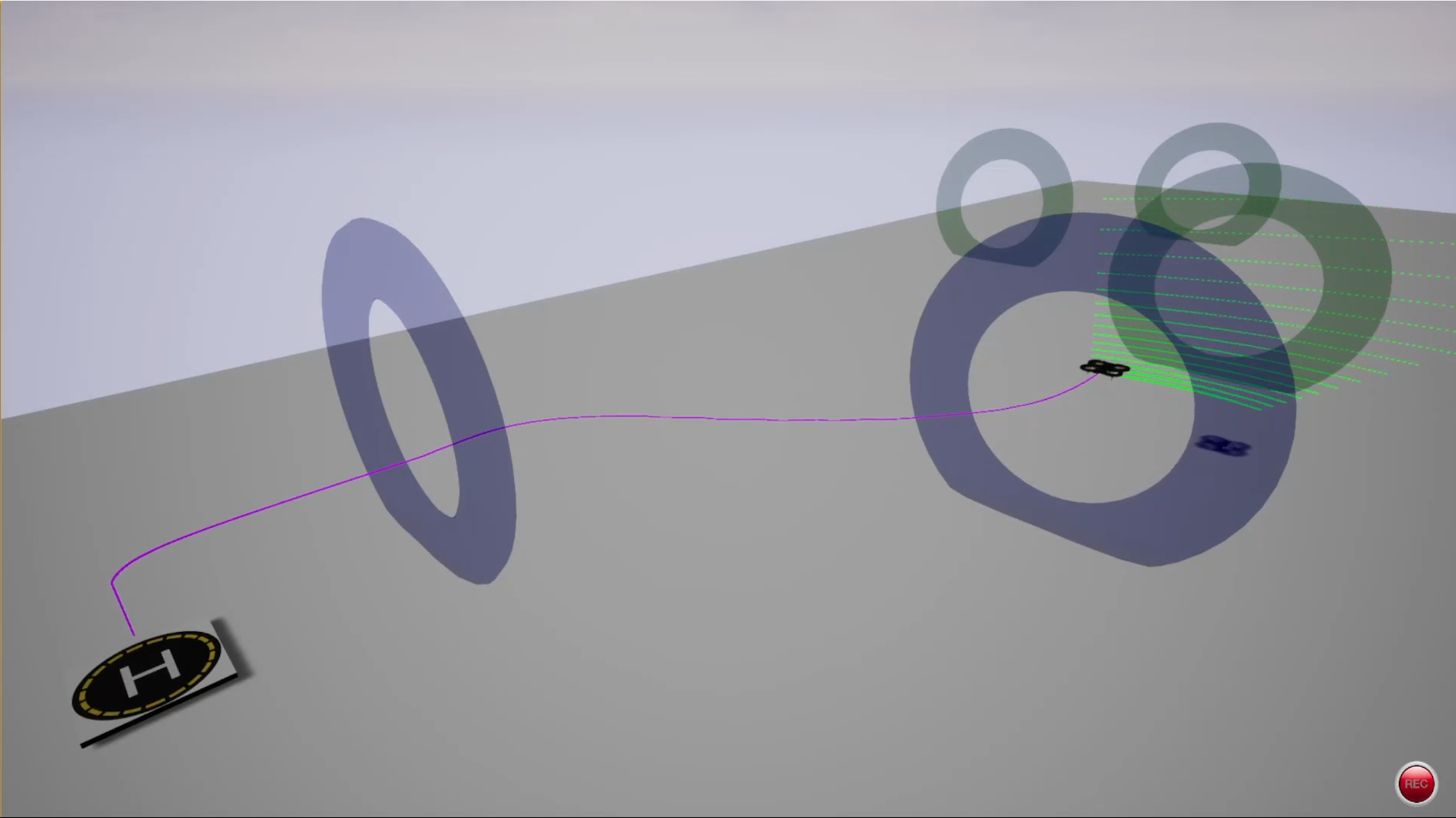
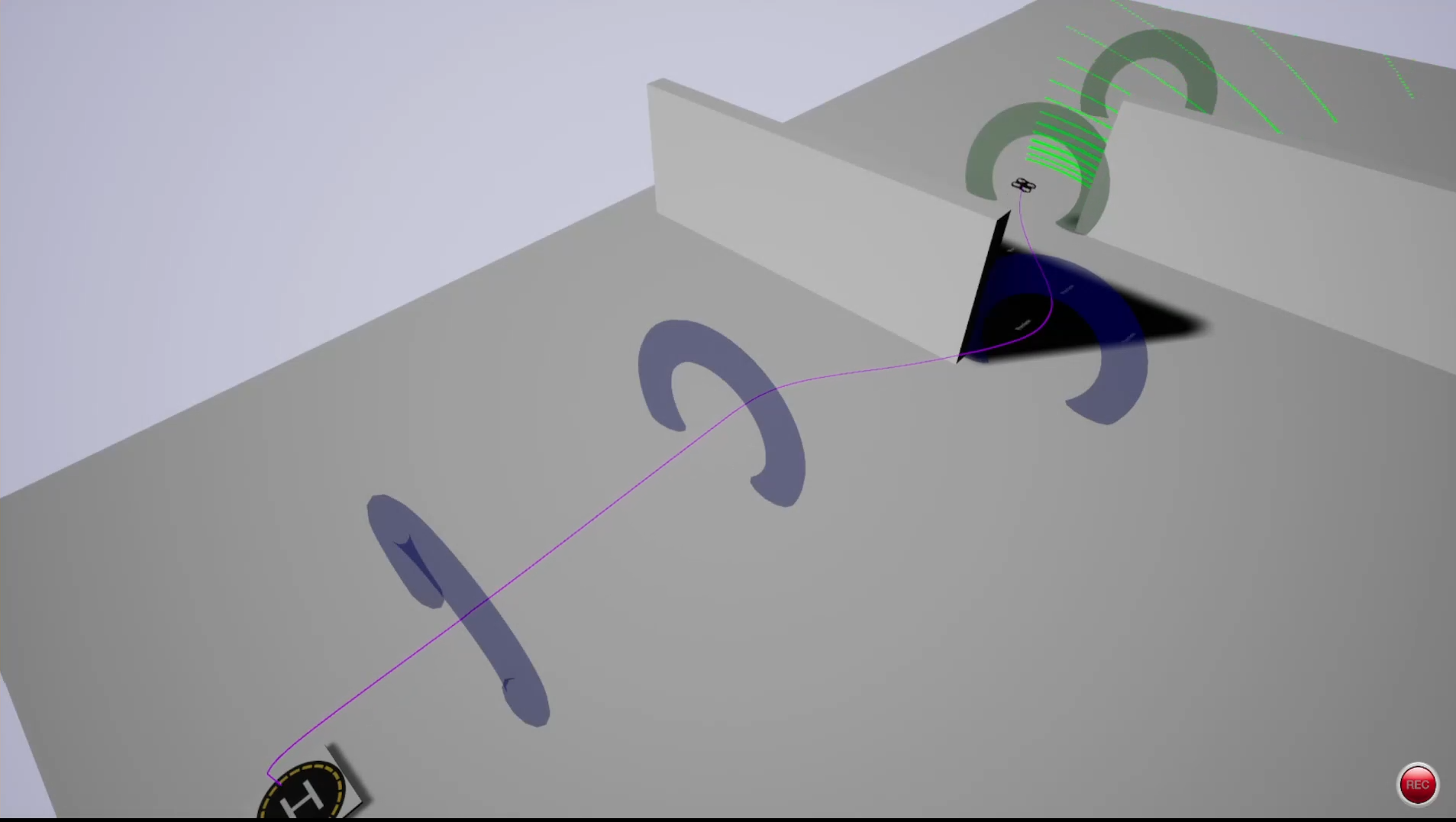
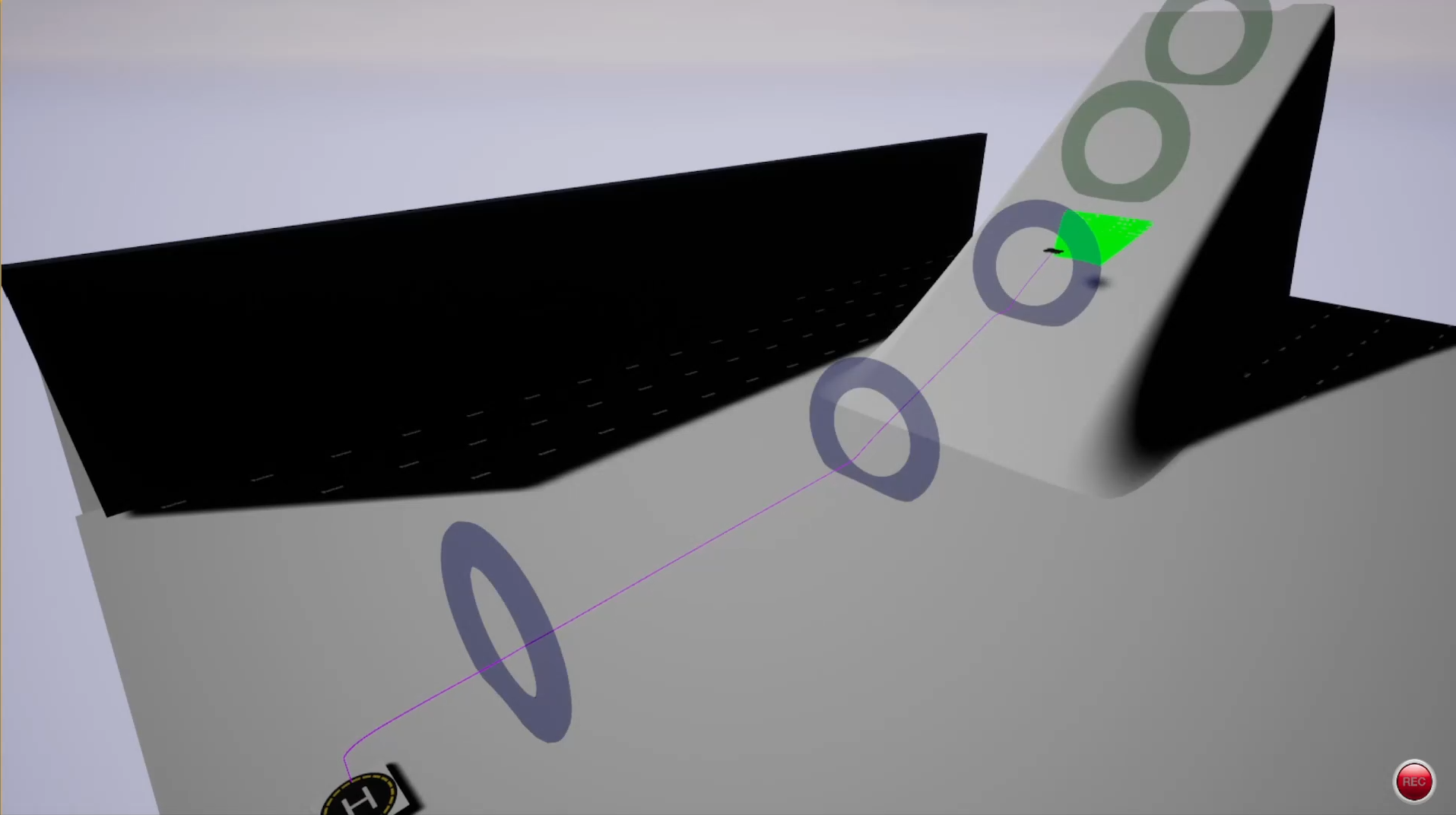
A set of environments with various obstacles that have varying levels of difficulty, and are designed to test the drone's ability to navigate around obstacles and sloped terrain.
Supported Features
Waypoint check
Detect if the drone has successfully navigated to each designated locations/waypoints
Waypoint navigation Example
Obstacle avoidance Example
Sloped terrain avoidance Example
SWARM Home environment
Description
A set of 3 regular, American style homes with configurable furniture assets including couches, dinner table, coffee table, lights and etc.
Supported Features
Home Environment Example


